Система виброакустического мониторинга TOPAZ SVAM

Система виброакустического мониторинга (далее по тексту - СВАМ) предназначена для своевременного обнаружения потенциально опасных для охраняемого объекта действий и передачи информации о месте и характере воздействия на вышестоящий уровень. Устанавливается на линейно-протяженных объектах (КЛ, ВЛ, газопроводы, нефтепроводы и др.) и периметриально-охраняемых объектах.
Основные преимущества СВАМ:
· Возможность использования в качестве распределенного датчика волокон из уже проложенных ВОЛС.
· Готовая библиотека событий, позволяющая максимально быстро ввести оборудование в эксплуатацию.
· Определение геодезических координат события для оперативного реагирования.
· Интеллектуальные алгоритмы обработки, позволяющие свести к минимуму количество ложных срабатываний.
· При установке на ВЛ возможно опционально дополнить СВАМ системой термоконтроля при плавке гололеда.
· Малые габариты (3U), позволяющие размещать оборудование в существующих стойках.
· Применение на высокоавтоматизированных подстанциях.
В СВАМ используется эффект Рэлеевского рассеяния лазерного луча в распределенной оптической среде. Распределенной оптической средой выступает одномодовое оптическое волокно (ОВ) G.652/G.654 .
Из теории известно, что при прохождении лазерного луча по ОВ в каждой точке возникает рассеяние, часть энергии возвращается обратно. Для обратного Рэлеевского рассеяния характерно, что фаза отраженного сигнала зависит от локальных возмущений (акустических воздействий, вибраций) в каждой точке, как показано на Рисунке 1:
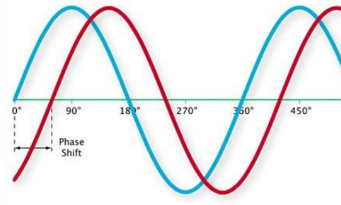
Рисунок 1. – Зависимость фазы отраженного сигнала от локальных возмущений.
Таким образом, оптический детектор, измеряющий обратное Рэлеевское рассеяние, может определить виброакустическое воздействие для каждой точки ОВ в пределах своей разрешающей способности. Расстояние до виброакустического воздействия определяется по времени прихода сигнала. Данный алгоритм представлен на рисунке 2.
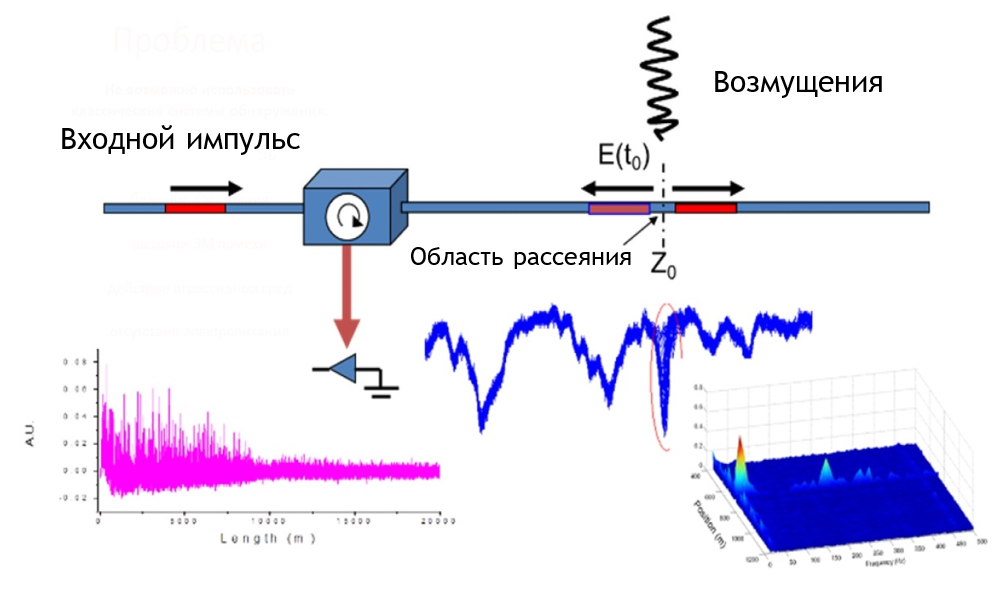
Рисунок 2. – Алгоритм определения виброакустического воздействия.
В СВАМ регистрируются воздействия на частотах от 1 Гц до 2,5 кГц.
Пространственное разрешение не более 5 метров. Данной разрешающей способности достаточно для уверенной регистрации виброакустических событий в полосе до нескольких десятков метров в обе стороны от распределенного датчика.
Измерительный прибор состоит из источника излучения (лазера) с ультра-узкой полосой частот и оптического фотоприемника. После преобразования в цифровой вид оптическим фотоприемником получается массив данных, который записывается в энергонезависимую память прибора. Фактически, массив данных представляет из себя оцифрованный звук в частотном диапазоне от 1 Гц до 2,5 кГц с пространственным разрешением 5 метров. При необходимости массив данных может быть сохранен на внешний носитель для последующего анализа и воспроизведения.
Массив данных в энергонезависимой памяти прибора подвергается преобразованию с использованием алгоритмов распознавания. Алгоритмы распознавания опираются на библиотеку шаблонов событий. На текущий момент в библиотеке имеются шаблоны для всех типов событий, имеющих характер несанкционированных действий в охраняемой зоне КВЛ. К таким событиям относятся работа тяжелой техники типа экскаватора, бурение и многое другое.
Алгоритмы распознавания имеют многоуровневую структуру. На первом уровне определяется тип события в конкретной точке, например «было сделано одно копание лопатой». В случае, если было сделано «копание лопатой» некоторое количество раз за некоторое время (настраиваемые величины), на следующем уровне эти события складываются в процесс «ручное копание». Если процесс «ручное копание» продолжается в течении некоторого времени (например, для КЛ с глубиной залегания 2м это время экспериментально установлено 30 мин.), на следующем уровне распознавания выдается сигнал «опасное ручное копание». Этот сигнал выдается для реагирования на событие.
Алгоритмы распознавания реализуются на отдельном вычислительном блоке, который работает совместно с прибором виброакустического мониторинга.
Результаты работы представляются на картографической основе, на которой нанесен трасса КВЛ. Каждый распознанный сигнал характеризуется геодезическими координатами и визуализируется на картографической подоснове.
В качестве распределенного датчика выступает одномодовое оптическое волокно (ОВ), как в силовом кабеле, так и проложенное отдельно. Учитывая, что незначительное количество кабельных линий имеет встроенное одномодовое ОВ, как правило используется внешнее ОВ.
Наиболее целесообразно использовать ОВ волоконно-оптической линии связи, которая прокладывается в непосредственной близости от силового кабеля. В таком случае типовая схема системы виброакустического мониторинга представлена на рисунке 3.

Рисунок 3. – Типовая схема СВАМ для КЛ
Измерительный прибор виброаккустического мониторинга TOPAZ SVAM и сервер устанавливаются на ПС. Учитывая, что типоразмер TOPAZ SVAM 3U, сервера 2U, оборудование может быть установлено в существующую стойку. Также можно установить отдельную стойку, внешний вид показан на рисунке 4.

Рисунок 4. – Внешний вид стойки СВАМ
Для работы требуется проложить патч-корд до комнаты связи, где производится коммутация на кроссе с наиболее подходящим по затуханию ОВ.
Для проведения пусконаладочных работ требуется план прокладки КЛ, с указанием глубины, типа прокладки, и пересечения трассы с источниками акустических воздействий.
План кабельной трассы наносится на картографическую подоснову, и привязывается к ней по источникам акустических воздействий. В дальнейшем картография, представляющая собой картографическую подоснову с нанесенным планом прокладки, доступна в составе ПО, установленном на произвольное количество АРМ в различных местах. Система виброаккустического мониторинга при возникновении события генерирует сигнал, который характеризуется типом события и координатами. При получении сигнала на карте АРМ производится визуализация события. При возникновении нескольких событий в разных местах визуализируется все. Внешний вид показан на рисунке 5.
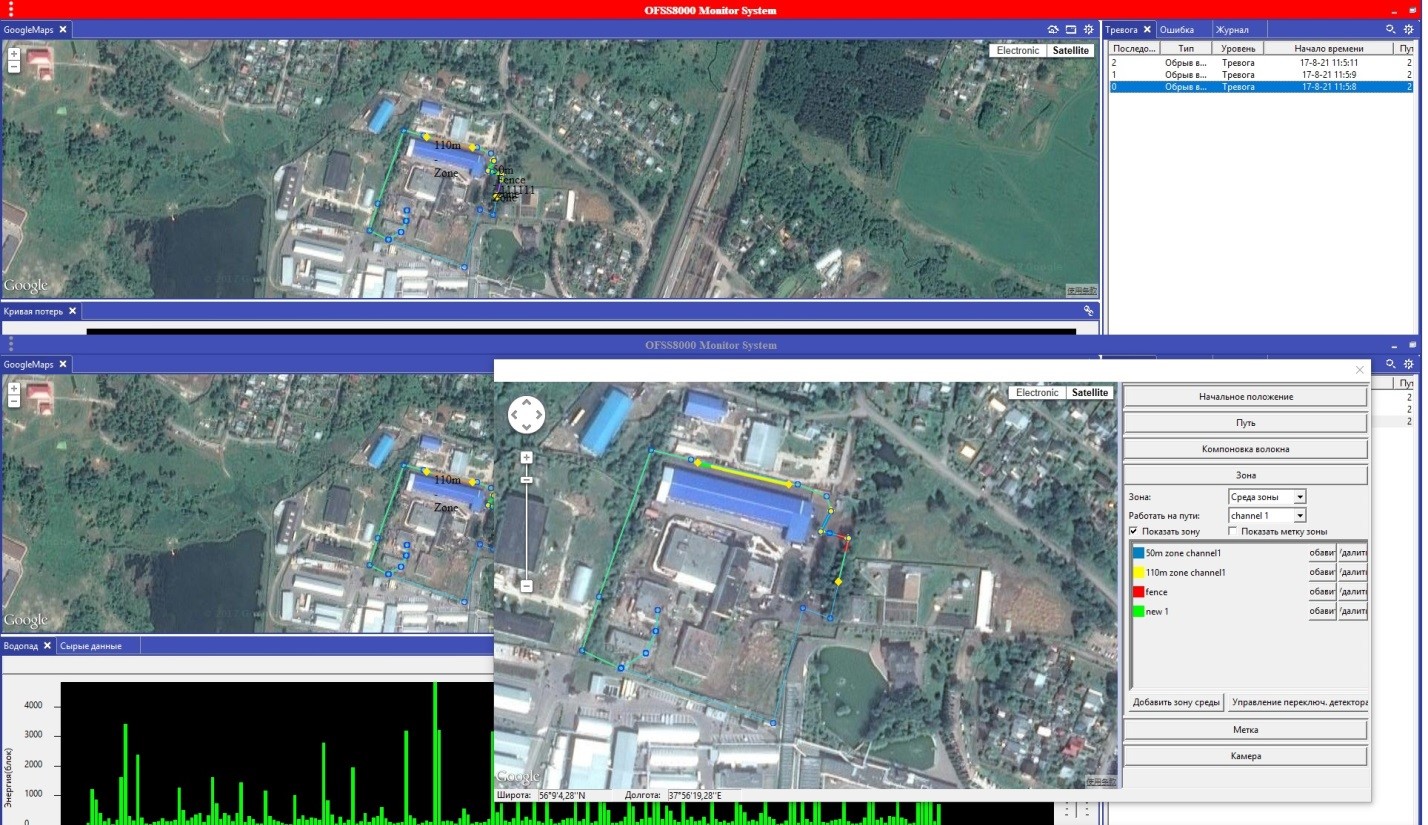
Рисунок 5. – Внешний вид окна ПО АРМ
Схема прокладки КЛ в картографии разбивается на зоны в процессе пусконаладки. Для каждой зоны устанавливается коэффициент шумоподавления, расстояние мониторинга слева и справа для регистрации, а также типы срабатывания (по каким шаблонам регистрируются события).
Технические характеристики СВАМ приведены в Таблице 1.
Таблица 1. - Технические характеристики СВАМ.
|
Рабочие условия эксплуатации, температура окружающего воздуха, 0С |
от -40 до +70 |
|
Рабочие условия эксплуатации, относительная влажность воздуха, без конденсата, % |
5 ÷ 95 при температуре 30 0С |
|
Рабочие условия эксплуатации, атмосферное давление воздуха, кПа |
от 60 до 106,7 |
|
Разбиение на полностью конфигурируемые независимые зоны |
Более 1000 |
|
Готовая библиотека событий |
В наличии |
|
Тип оптоволокна распределенного датчика |
SM (одномодовое) G.652/G.654 |
|
Максимальная длина распределенного датчика, км |
до 100 |
|
Точность определения места возникновения события, м |
+-5 |
|
Среднее время регистрации события, с |
+-5 |
|
Частоты, используемые для регистрации события, Гц |
1-2500 |
|
Время установления рабочего режима, мин, не более |
10 |
|
Оптические разъемы |
FC/APC |
|
Длина волны источника излучения, нм |
1550 |
|
Режим работы |
Непрерывный |
|
Наличие движущихся частей |
Отсутствуют (используется безвентиляторная технология) |
|
Интерфейсы |
RS232, RJ45 |
|
Протоколы обмена |
МЭК 61850-8-1 MMS, МЭК 61850-8-1 GOOSE, МЭК 60870-5-104, DNP3, Modbus TCP, МЭК 60870-5-101, Modbus RTU, SNMP v1/v2/v3 |
|
Протоколы резервирования связи |
RSTP, PRP, HSR |
|
Технология взаимодействия с базой данных |
Клиент-Сервер |
|
Глубина хранения виброаккустических данных, мес. |
Не менее 3 |
|
Напряжение питания, В |
100÷240АС |
|
Частота напряжения переменного тока, Гц |
45÷60 |
|
Потребляемая мощность, Вт, не более: |
25 |
|
Время автономной работы, ч, не менее |
8,5 |
|
Средний срок службы, лет |
30 |
Оставьте заявку на консультацию
Выходные дни: сб, вс
